彻底改变植物表型分析深度学习和3D点云技术克服重建挑战
3维点云技术彻底改变了植物表型参数的非侵入式测量,为农业和研究提供了重要数据。目前的研究重点是克服 2.5D 成像和遮挡的局限性。为此目的,正在探索运动结构、多视图立体和先进的主动 3D 重建技术等方法。然而,由于植物遮挡和环境因素,数据采集不完整以及表型参数提取不准确的问题仍然存在。最近,将深度学习与点云分析以及强化学习代理控制的 GAN 网络和多尺度几何感知 Transformer 网络等创新技术相结合,通过增强点云完成度和保持原始数据的完整性,有望解决这些挑战。
2023年11月,Plant Phenomics 发表题为《基于深度学习的遮挡条件下植物叶子的点云完成》的研究文章。
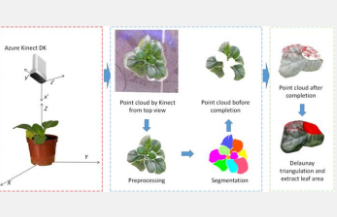
本研究利用基于神经网络的点云补全,特别是 PF-Net 算法,来重建大白菜叶子的 3D 模型,该模型因其复杂的结构而具有挑战性。使用 PF-Net 创建和训练卷心菜叶点云数据集,并使用 Azure Kinect 相机获得不完整的点云。神经网络补充了这些不完整的点云,实现了全3D重建,然后与MVS-SFM算法进行精度比较。结果表明,PF-Net成功地从MVS-SFM和Azure Kinect数据集完成了各种形状和弯曲程度的点云,展示了其完成复杂结构的强大能力。然而,在多个缺失部分的区域,完成效果较差。随着缺失率的增加,补全效应减弱,特别是在叶点云的孔洞中,这表明虽然网络有效地学习了结构关系,但它在处理更大的缺失区域时遇到了困难。在自然遮挡条件下,与 MVS-SFM 算法相比,PF-Net 提高了叶点云的完整性,但在多重遮挡或高缺失率方面遇到了困难。该研究还检查了重建精度和叶面积提取结果。重建点云中大约一半的点对距离误差小于2 mm,表明与MVS-SFM方法具有中等一致性。叶面积提取分析表明,点云完成后叶面积估计的准确性有所提高,结果与使用 MVS-SFM 算法获得的结果接近。
尽管取得了这些令人鼓舞的结果,但该研究承认在完成现实世界的不完整点云方面存在差距,并且由于点云的旋转不变性特性而导致点云方向的挑战。未来的改进包括开发更真实的训练数据集并解决方向估计挑战,可能通过多阶段完成网络,该网络可以在完成模型之前学习和调整模型的正确姿势。总体而言,该研究为使用主动传感器进行植物表型研究提供了新的视角,并证实了深度学习在提高表型参数估计精度方面的潜力。
免责声明:本答案或内容为用户上传,不代表本网观点。其原创性以及文中陈述文字和内容未经本站证实,对本文以及其中全部或者部分内容、文字的真实性、完整性、及时性本站不作任何保证或承诺,请读者仅作参考,并请自行核实相关内容。 如遇侵权请及时联系本站删除。